(in collaborazione con il Laboratorio di Elettronica Industriale e National Instruments).
Responsabile Tecnico: Ing. Marco Tiberti
Responsabile Operativo: Prof. Cristiano Maria Verrelli
 Il laboratorio dispone di diversi prototipi di sistemi elettromeccanici su cui effettuare test sperimentali.
Il laboratorio dispone di diversi prototipi di sistemi elettromeccanici su cui effettuare test sperimentali.
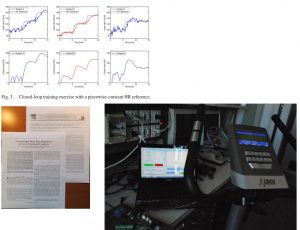
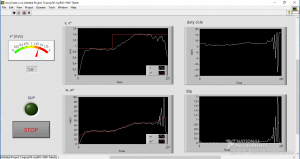
In particolare sono disponibili un cicloergometro DKN AM5 e motori elettrici di diverso tipo e taglia, quali motori in corrente continua da 2 kW, motori ad induzione da 0.6, 5, 7.5, 13 kW, motori sincroni a magneti permanenti da 0.6 kW e 3 kW, motori passo-passo e di tutti gli apparati necessari per il loro controllo e per la valutazione delle loro performance.
 Sono inoltre disponibili set-up che impiegano microcontrollori a 16 bit (virgola fissa) o DSP (virgola mobile) che comandano gli inverter; oscilloscopi (a canali isolati), sensori di corrente ad elevata precisione, banchi prova alimentati.
Sono inoltre disponibili set-up che impiegano microcontrollori a 16 bit (virgola fissa) o DSP (virgola mobile) che comandano gli inverter; oscilloscopi (a canali isolati), sensori di corrente ad elevata precisione, banchi prova alimentati.
Inoltre il laboratorio dispone della strumentazione necessaria per le misure e l’analisi di vibrazioni e fornisce il supporto tecnico ai lavori di tesi sperimentali e alle esercitazioni pratiche del corso di Identificazione dei Sistemi Dinamici.
Attualmente il Laboratorio si è dotato di modelli di automobili in scala 1:10, equipaggianti di motori brushless, sui quali effettuare prove sperimentali di algoritmi di controllo per i veicoli elettrici.
Questi veicoli sono modificati sia meccanicamente che elettronicamente per adattarli agli scopi sperimentali.




Un elenco di alcune tesi svolte con la collaborazione del Laboratorio di Controlli Adattativi e non Lineari:
Tesi dal 2007 al 2008
- 2007-2008- “Controllo ad apprendimento per motori elettrici a magneti permanenti: confronto tra tecniche iterative e adattative”, Corso di Laurea in “Ingegneria dei Modelli e dei Sistemi”.
- 2008/2009- “Controllo ad apprendimento per motori a magneti permanenti”, Corso di Laurea in “Ingegneria dei Modelli e dei Sistemi”.
- 2009/2010- “Controllo ad apprendimento per una classe di sistemi non lineari”, Corso di Laurea in “Ingegneria dei Modelli e dei Sistemi”.
- 2009/2010- “Confronto sperimentale tra tecniche di controllo ad apprendimento per azionamenti di posizione ad elevate prestazioni”, Corso di Laurea Specialistica in “Ingegneria Elettronica”.
Tesi dal 2010 al 2013
- 2010/2011- “Controllo ad apprendimento per autoveicoli autonomi”, Corso di Laurea in “Ingegneria Matematica”.
- 2010/2011- “Identificatore di resistenze per motori ad induzione: applicazione al controllo”, Corso di Laurea in “Ingegneria Elettronica”.
- 2010/2011- “Controllo ad apprendimento della frequenza cardiaca: applicazione ad esercizi su pedana mobile”, Corso di Laurea in “Ingegneria Matematica”.
- 2010/2011- “Implementazione di un algoritmo di controllo sensorless per azionamenti con motore sincrono a magneti permanenti”, Corso di Laurea Specialistica in “Ingegneria Elettronica”.
- 2011/2012- “Controllo ad apprendimento del battito cardiaco (HR) e dell’HRV su cicloergometri: teoria ed esperimenti”, Corso di Laurea Specialistica in “Ingegneria dell’Automazione”.
- 2011/2012- “Algoritmi di controllo ad apprendimento per la sincronizzazione di robot”, Corso di Laurea in “Ingegneria Matematica”.
- 2011/2012 – “Controllo non lineare adattativo di motori asincroni con applicazione ad autoveicoli elettrici”, Corso di Laurea Magistrale in “Ingegneria Matematica”.
- 2012/2013- “Tecniche avanzate di controllo non lineare e adattativo per motori asincroni”, Corso di Laurea Magistrale in “Ingegneria Matematica”.
- 2012/2013- “Progetto e realizzazione di un dispositivo automatico per esercizi al cicloergometro controllati in HRV”, Corso di Laurea in “Ingegneria Matematica”.
- 2012/2013- “Risultati sperimentali sulla regolazione della frequenza cardiaca sotto sforzo sul cicloergometro”, Corso di Laurea Magistrale in “Ingegneria dell’Automazione”.
- 2012/2013- “Implementazione su microprocessore di un controllo ad orientamento di campo di tipo indiretto per motori asincroni con adattamento on-line dei parametri elettrici”, Corso di Laurea Magistrale in “Ingegneria Elettronica”.
Tesi dal 2013 al 2015
- 2013-2014- “Repetitive learning control for permanent magnet step motors”, Corso di Laurea Magistrale in “Ingegneria Elettronica”.
- 2014-2015- “Controllo digitale ad orientamento di campo per motori a induzione di tipo adattativo sensorless”, Corso di Laurea Magistrale in “Ingegneria Meccatronica”, Università degli Studi di Modena e Reggio Emilia.
- 2014-2015- “Validazione sperimentale di un controllo non lineare sensorless per motori brushless sinusoidali”, Corso di Laurea Magistrale in “Ingegneria Meccatronica”, Università degli Studi di Modena e Reggio Emilia.
- 2014-2015- “Definition of performance evaluation index for cycle-ergometer exercises”, Corso di Laurea in “Engineering Sciences”.
- 2014-2015- “Sincronizzazione di motori sincroni a magneti permanenti con cancellazione adattativa dei disturbi”, Corso di Laurea Magistrale in “Ingegneria dell’Automazione”.
- 2014-2015- “Osservatore adattativo di flussi per motori a induzione e applicazioni”, Corso di Laurea in “Ingegneria Matematica”.
- 2014-2015- “Controllo ad apprendimento di robot nel caso di incertezze di periodo”, Corso di Laurea in “Ingegneria Matematica”.
- 2014-2015- “Cruise control per autoveicoli elettrici con generazione adattativa di riferimento per la velocità del motore. Prova di stabilità e risultati sperimentali”, Corso di Laurea in “Ingegneria Energetica”.
- 2014-2015- “Controllo ad apprendimento per la sincronizzazione di robot: risultati sperimentali”, Corso di Laurea Magistrale in “Ingegneria Elettronica”.
Tesi dal 2015 al 2016
- 2015/2016- “Controllo adattativo di motori sincroni a magneti permanenti senza sensori di posizione”, Corso di Laurea in “Ingegneria Elettronica”.
- 2015/2016- “Synchronization control of DC motors through adaptive disturbance cancellation – Stability analysis”, Corso di Laurea in “Engineering Sciences”.
- 2015/2016- “Synchronization control of DC motors through adaptive disturbance cancellation – Implementation issues”, Corso di Laurea in “Engineering Sciences”.
- 2015/2016- “Cruise control innovativo per autoveicoli elettrici con vincoli sullo slittamento. Setup sperimentale e validazione”, Corso di Laurea Magistrale in “Ingegneria dell’Automazione”.
- 2015/2016- “Cruise control innovativo per autoveicoli elettrici: set-up sperimentale e validazione”, Corso di Laurea in “Ingegneria Elettronica”.
- 2015/2016- “Cruise/Side-slip control innovativo per veicoli elettrici con motori in-wheel: set-up sperimentale e validazione”, Corso di Laurea in “Ingegneria Elettronica”.
- 2015/2016- “Output feedback control for voltage regulation and transient stabilization of synchronous generators with uncertain parameters”, Corso di Laurea in “Engineering Sciences”.
- 2015/2016- “Identifiability of winding resistances in induction motors – Persistency of excitation conditions and adaptive observer design”, Corso di Laurea in “Ingegneria Elettronica”.
Tesi dal 2016 al 2017
- Automatic speed reference generators for electric vehicles with in-wheel motors under slip constraints, Corso di Laurea in Engineering Sciences.
- Sezione aurea e armonia di gait, Corso di Laurea in Ingegneria Elettronica.
- Nuovi sviluppi sperimentali per il controllo di frequenza cardiaca in esercizi al cicloergometro, Corso di Laurea in Ingegneria dell’Automazione Magistrale.
- Controllo ad apprendimento per veicoli autonomi: Nuovi risultati teorici e sperimentali, Corso di Laurea in Ingegneria Elettronica.
- Modellazione della performance in atleti professionisti: Risultati teorici sperimentali, Corso di Laurea in Ingegneria dell’Automazione Magistrale.
- Osservatori adattativi per il controllo di motori sincroni a magneti permanenti: Nuovi sviluppi teorici e sperimentali, Corso di Laurea in Ingegneria dell’Automazione Magistrale.
- Analisi delle ripetitività nelle strategie di gioco in partite di calcio professionistiche, Corso di Laurea in Ingegneria di Internet.
- Controllo della frequenza cardiaca per esercizi al ciclo-ergometro: validazione sperimentale, Corso di Laurea in Ingegneria Elettronica.
- Nuovi sviluppi sperimentali su sezione aurea e gait harmony, Corso di Laurea in Ingegneria Elettronica.
Tesi dal 2017 al 2019
- Sincronizzazione di motori DC con cancellazione adattativa di disturbi: Retroazione parziale dallo stato, Corso di Laurea in Ingegneria Elettronica.
- Cancellazione adattativa di disturbi per la sincronizzazione di motori DC: Risultati sperimentali, Corso di Laurea in Ingegneria Elettronica.
- Analisi di ripetitività strategiche in partite di calcio professionistiche: nuovi sviluppi, Corso di Laurea in Ingegneria di Internet.
- Analisi di ripetitività strategiche in partite di calcio professionistiche: Data processing and user inteface design, Corso di Laurea in Ingegneria di Internet.
- Gait harmony and golden ratio: new theoretical and experimental developments, Corso di Laurea in Engineering Sciences.
- Progetto e realizzazione di sistemi di controllo integrati per esercizi al cicloergometro nella riabilitazione di pazienti cardiopatici, Corso di Laurea Magistrale in Ingegneria Energetica.
- Stima e predizione di performance in atleti professionisti ed analisi di dati ormonali, Corso di Laurea Magistrale in Ingegneria Elettronica.
- Gait harmony e sezione aurea: sviluppo di un nuovo sistema sensorizzato per la rilevazione della pressione, Corso di Laurea Magistrale in Ingegneria Elettronica.
- Innovativi esercizi al ciclo ergometro con controllo della frequenza cardiaca: sviluppi sperimentali su pazienti cardiopatici, Corso di Laurea in Ingegneria Elettronica.
- REHABILITATION OF PATIENTS WITH CHRONIC HEART FAILURE: A REMOTE WEB-BASED INTERFACE, Corso di Laurea in Engineering Sciences.
- WEB SHARED HRV-ANALYSIS FOR REMOTE REHABILITATION PROGRAMS, Corso di Laurea Magistrale in Mechatronics Engineering.
- Bipedal Robot Walking: Adaptive Control and Gait Synchronicity, Corso di Dottorato in Ingegneria Elettronica.
Tesi dal 2019 al 2022
- Analisi e comparazione delle caratteristiche della progettazione e dello sviluppo dei radar ad apertura sintetica secondo l’approccio classico e New Space, Corso di Laurea in Ingegneria di Internet.
- Slip vector control di veicoli elettrici a 4 motori in-wheel: Sviluppi teorici e sperimentali, Corso di Laurea in Ingegeneria Elettronica.
- Distributed wheel status monitoring for slip-vectoring control of in-wheel motor drive electric vehicles: Novel developments, Corso di Laurea in Engineering Sciences.
- Motion control of an electric vehicle with 4-in.wheel motors, Corso di Laurea in Engineering Sciences.
- Repetitive learning control for integer multi-period signals, Corso di Laurea in Engineering Sciences.
- Repetitive Learning Control for a Soft Robotic Fish with Integrated Soft Sensing, Corso di Laurea Magistrale in Mechatronics Engineering.
- Global observers for induction motors with arbitrary rate of convergence, Corso di Laurea Magistrale in Mechatronics Engineering.
- Adaptive Learning Control for Nonlinear Systems with Extended Matching Unstructured Uncertainties and a Single Learning Estimation Scheme, Corso di Laurea Magistrale in Ingegneria Elettronica.
- REFERENCE GENERATOR FUNCTION IDENTIFICATION FOR ELECTRICAL VEHICLES WITH IN-WHEEL MOTORS, Corso di Laurea in Engineering Sciences.
- Speed Reference Generators for Autonomous Electric Vehicles Powered by In-Wheel Motors through Hough Transform Algorithm, Corso di Laurea Magistrale in Mechatronics Engineering.
- Model predictive control design of sputnik left ventricular assist device flow and output flow estimation, Corso di Laurea Magistrale in Mechatronics Engineering.
- New Motor Speed Reference Generator for the Slip Control of the In-Wheel Electric Vehicle, Corso di Laurea Magistrale in Mechatronics Engineering.